目录任务控制块数据结构任务创建函数定义就绪表就绪表初始化启动调度器任务切换 任务控制块数据结构 任务控制块数据结构在task.c声明 typedef str
任务控制块数据结构在task.c声明
typedef struct tskTaskControlBlock
{
volatile StackType_t * pxTopOfStack; //栈顶指针
ListItem_t xStateListItem; //任务节点
StackType_t * pxStack; //任务栈起始地址
char pcTaskName[configMAX_TASK_NAME_LEN];//任务名称
}tskTCB;
下面是用静态方式创建任务的函数
static void prvInitialiseNewTask(TaskFunction_t pxTaskCode,
const char * const pcName,
const uint32_t ulStackDepth,
void * const pvParameters,
TaskHandle_t* const pxCreatedTask,
TCB_t * pxNewTCB)
{
StackType_t * pxTopOfStack;
UBaseType_t x;
//栈顶地址
pxTopOfStack = pxNewTCB->pxStack + (ulStackDepth - (uint32_t) 1);
//项下做8字节对齐
pxTopOfStack = (StackType_t*) ( (uint32_t)pxTopOfStack & (~(uint32_t)0x0007) );
//存储名字
for(x=(UBaseType_t)0;x<(UBaseType_t)configMAX_TASK_NAME_LEN;x++)
{
pxNewTCB->pcTaskName[x] = pcName[x];
if(pcName[x]=='\0')
break;
}
pxNewTCB->pcTaskName[configMAX_TASK_NAME_LEN-1] = '\0';
//初始化TCB中的xStateListItem列表项
vListInitialiseItem(& (pxNewTCB->xStateListItem));
//设置xStateListItem列表项的拥有者即为传入的TCB
listSET_LIST_ITEM_OWNER( &(pxNewTCB->xStateListItem), pxNewTCB );
//初始化任务栈,并返回更新的栈顶指针
pxNewTCB->pxTopOfStack = pxPortInitialiseStack(pxTopOfStack,pxTaskCode,pvParameters);
//返回任务句柄
if((void*)pxCreatedTask !=NULL )
{
*pxCreatedTask = (TaskHandle_t) pxNewTCB;
}
}
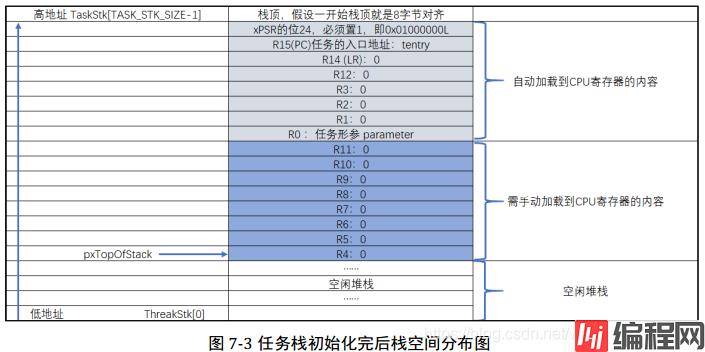
下面看pxPortInitialiseStack是怎么初始化任务栈的
因为是向下生长的满栈,所以是--操作
#define portINITIAL_XPSR (0x01000000)
#define portSTART_ADDRESS_MASK ((StackType_t)0xfffffffeUL)
StackType_t * pxPortInitialiseStack(StackType_t* pxTopOfStack, TaskFunction_t pxCode, void*pvParameters)
{
//-------------设置内核会自动加载的寄存器,且顺序不能变
pxTopOfStack--;
*pxTopOfStack = portINITIAL_XPSR;//xPSR bit24
pxTopOfStack--;
*pxTopOfStack = ( ( StackType_t ) pxCode ) & portSTART_ADDRESS_MASK;//R15 PC
pxTopOfStack--;
*pxTopOfStack = ( StackType_t ) prvTaskExitError;//R14 LR
pxTopOfStack -= 5; //R12 R3 R2 R1
*pxTopOfStack = ( StackType_t ) pvParameters;//R0
//--------------下面8个需要手动保存
pxTopOfStack-=8;
//返回更新后的栈顶指针
return pxTopOfStack;
}
如下图
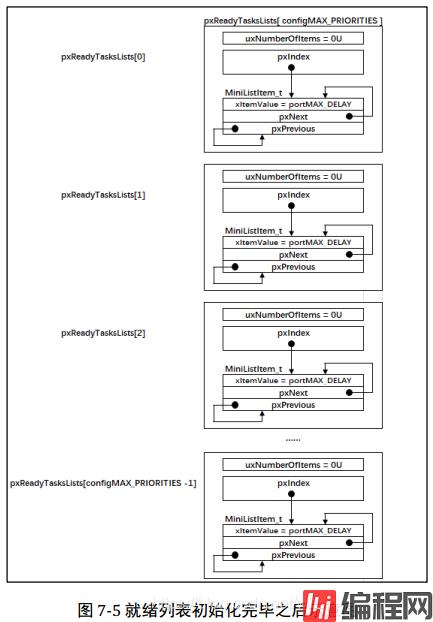
在task.c中,就绪表就是列表类型的数组,元素个数是configMAX_PRIORITIES,就绪表把同一优先级的任务插入到同一优先级的链表中,数组下标表示优先级,如下图
#define configMAX_PRIORITIES 5
List_t pxReadyTasksLists[configMAX_PRIORITIES];就绪表初始化就是把数组每个元素(即列表)初始化(即调用vListInitialise),结果如下
void prvInitialiseTaskLists(void)
{
UBaseType_t uxPriority;
for(uxPriority = (UBaseType_t)0 ;
uxPriority < (UBaseType_t) configMAX_PRIORITIES;
uxPriority ++)
{
vListInitialise(&(pxReadyTasksLists[uxPriority]));
}
}
调用关系,这里手动指定第一个运行的任务
vTaskStartScheduler->xPortStartScheduler->prvStartFirstTask
void vTaskStartScheduler(void)
{
//手动指定一个和要运行的任务
pxCurrentTCB = &Task1TCB;
//启动调度器
if(xPortStartScheduler()!=pdfALSE)
{
//启动成功不会跑到这里
}
}
//STM32 用4bit表示优先级,所以最低优先级则是15
#define configKERNEL_INTERRUPT_PRIORITY 15
#define portNVIC_SYSPRI2_REG (*((volatile uint32_t*) 0xe000ed20))
#define portNVIC_PENDSV_PRI (((uint32_t)configKERNEL_INTERRUPT_PRIORITY)<<16UL)
#define portNVIC_SYSTICK_PRI (((uint32_t)configKERNEL_INTERRUPT_PRIORITY)<<24UL)
BaseType_t xPortStartScheduler(void)
{
//把pendsv systick中断优先级设置为最低
portNVIC_SYSPRI2_REG |=portNVIC_PENDSV_PRI;
portNVIC_SYSPRI2_REG |=portNVIC_SYSTICK_PRI;
//启动第一个任务,该函数不会返回
prvStartFirstTask();
//不会运行到这里
return 0;
}
在CM3中,0xE000ED08存放的是SCB_VTOR寄存器地址,SCB_VTOR是向量表的起始地址,即MSP的地址
__asm void prvStartFirstTask(void)
{
PRESERVE8
ldr r0, =0xE000ED08 //r0=0xE000ED08,相当于r0=&SCB_VTOR
ldr r0, [r0] //r0=*r0,即r0=*((uint32_t*)0xE000ED08),即r0=0x0
ldr r0, [r0] //r0=*r0,即r0=*((uint32_t*)0x0),即r0=msp指针值
msr msp, r0 //msp=r0,msp指针获得msp地址
cpsie i //开中断
cpsie f //开中断
dsb
isb
svc 0 //触发SVC系统调用,此后会进入SVCHandler
nop //下面这2个nop不会执行
nop
}
__asm void vPortSVCHandler(void)
{
extern pxCurrentTCB;
PRESERVE8
//r3=&pxCurrentTCB,注意pxCurrentTCB本身就是一个指针,是指向一个任务的TCB指针
ldr r3, =pxCurrentTCB
//r1=*r3,即r1=pxCurrentTCB
ldr r1, [r3]
//r0=*r1,此时r1=pxCurrentTCB,
//又结构体第一个成员(栈顶指针)的地址和结构体地址数值上是相同的,
//所以r0=*(&(pxCurrentTCB.pxTopOfStack)),即r0=pxCurrentTCB.pxTopOfStack,
//即r0此时指向当前任务空闲栈顶位置
ldr r0, [r1]
//以r0为开始把r4-r11依次保存到当前任务的psp栈
ldmia r0!,{r4-r11}
//更新当前任务psp栈指针
msr psp,r0
isb
mov r0, #0
msr basepri,r0 //开中断
//此时r14是0xFFFF_FFF9,表示返回后进入Thread mode,使用MSP,返回Thmub状态,
//这里其实是把bit2置1,要求返回后使用PSP
orr r14,#0x0d
//返回,这里会自动加载初始化任务栈填写的xPSR、R15、R14、R12、R3-R0值到内核对应寄存器,
//所以返回后就直接到pxCurrentTCB指向的任务
bx r14
}
这里手动触发任务切换,其实就是向中断控制及状态寄存器ICSR(地址0xE000_ED04)PENDSVSET位(bit28)写1悬起pendsv中断,在pendsv_handler中寻找下一个要运行的任务并做任务切换
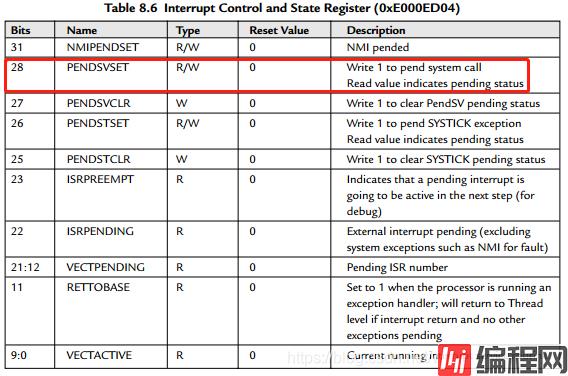
#define taskYIELD() portYIELD()#define portNVIC_INT_CTRL_REG (*((volatile uint32_t*)0xe000ed04))
#define portNVIC_PENDSVSET_BIT (1<<28UL)
#define portSY_FULL_READ_WRITE (15)
#define portYIELD() \
{ \
//触发一次pendsv中断
portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT; \
__dsb(portSY_FULL_READ_WRITE); \
__isb(portSY_FULL_READ_WRITE); \
}
__asm void xPortPendSVHandler(void)
{
//进入中断前会自动保存xPSR、R15、R14、R12、R3-R0到当前任务P栈中,此时任务栈顶指针指向要保存R11的位置
extern pxCurrentTCB;
extern vTaskSwitchContext;//这个函数是用来寻找下一个要运行的任务
PRESERVE8
mrs r0,psp //当前任务栈psp指针存入r0,
isb
ldr r3,=pxCurrentTCB //r3=&pxCurrentTCB
ldr r2,[r3] //r2=*r3, 即r2=pxCurrentTCB
//以r0开始递减的手动保存r4-r11
stmdb r0!,{r4-r11}
//r0=*r2,此时r2=pxCurrentTCB,
//又结构体第一个成员(栈顶指针)的地址和结构体地址数值上是相同的,
//所以r0=*(&(pxCurrentTCB.pxTopOfStack)),即r0=pxCurrentTCB.pxTopOfStack,
//即r0此时指向当前任务空闲栈顶位置
str r0,[r2]
//到这里上文就保存完成
//将r3、r14压入栈保存起来(此时sp使用的是msp)
//r14要保存是因为等下要调用函数,避免r14被覆盖无法从pendsv中断正常返回
//r3要保存是因为r3保存的是当前正在运行任务控制块的二级指针&pxCurrentTCB,后面要通过r3来操作pxCurrentTCB来切到下文
stmdb sp!,{r3,r14}
//关中断,阈值是configMAX_SYSCALL_INTERRUPT_PRIORITY
mov r0,#configMAX_SYSCALL_INTERRUPT_PRIORITY
msr basepri,r0
dsb
isb
//调用vTaskSwitchContext,功能是找到优先级最高的任务,然后让pxCurrentTCB = &优先级最高任务TCB,我们这里手动指定
bl vTaskSwitchContext
//开中断
mov r0,#0
msr basepri,r0
//从msp中恢复r3、r14
ldmia sp!,{r3,r14}
//r1=*r3,此时r3=&pxCurrentTCB
//即r1=pxCurrentTCB
ldr r1,[r3]
//r0=*r1则r0=pxCurrentTCB.pxTopOfStack 理由前面讲过
ldr r0,[r1]
//这里把pxCurrentTCB保存的需要手动加载的值加载到内核的r4-r11
ldmia r0!,{r4-r11}
//更新加载了r4-r11的任务栈到psp
msr psp,r0
isb
//返回,这里会以psp自动加载保存了xPSR、R15、R14、R12、R3-R0值到内核的xPSR、R15、R14、R12、R3-R0寄存器,所以返回的是pxCurrentTCB任务
bx r14
nop
}
这里为了简单手动指定TCB
extern TCB_t Task1TCB;
extern TCB_t Task2TCB;
void vTaskSwitchContext(void)
{
if(pxCurrentTCB == &Task1TCB)
{
pxCurrentTCB = &Task2TCB;
}
else
{
pxCurrentTCB = &Task1TCB;
}
}
至此任务切换原理讲完
main.c
extern List_t pxReadyTasksLists[configMAX_PRIORITIES];
portCHAR flag1;
portCHAR flag2;
TaskHandle_t Task1_Handle;
StackType_t Task1Stack[128];
TCB_t Task1TCB;
TaskHandle_t Task2_Handle;
StackType_t Task2Stack[128];
TCB_t Task2TCB;
void delay(uint32_t x)
{
for(;x!=0;x--);
}
void Task1_Fntry(void *arg)
{
while(1)
{
flag1=1;
delay(100);
flag1=0;
delay(100);
taskYIELD();//手动触发切换任务
}
}
void Task2_Fntry(void *arg)
{
while(1)
{
flag2=1;
delay(100);
flag2=0;
delay(100);
taskYIELD();//手动触发切换任务
}
}
int main(void)
{
//初始化就绪列表
prvInitialiseTaskLists();
//创建任务1
Task1_Handle = xTaskCreateStatic(Task1_Fntry,"task1",128,NULL,Task1Stack,&Task1TCB);
//将任务添加到就绪列表
vListInsertEnd(&pxReadyTasksLists[1],&((&Task1TCB)->xStateListItem));
//创建任务2
Task2_Handle = xTaskCreateStatic(Task2_Fntry,"task2",128,NULL,Task2Stack,&Task2TCB);
//将任务添加到就绪列表
vListInsertEnd(&pxReadyTasksLists[2],&((&Task2TCB)->xStateListItem));
//启动调度器
vTaskStartScheduler();
for(;;);
}
以上就是FreeRTOS实时操作系统的任务创建与任务切换的详细内容,更多关于FreeRTOS任务创建与切换的资料请关注编程网其它相关文章!
--结束END--
本文标题: FreeRTOS实时操作系统的任务创建与任务切换
本文链接: https://www.lsjlt.com/news/145197.html(转载时请注明来源链接)
有问题或投稿请发送至: 邮箱/279061341@qq.com QQ/279061341
下载Word文档到电脑,方便收藏和打印~
2024-03-01
2024-03-01
2024-03-01
2024-03-01
2024-03-01
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
回答
回答
回答
回答
回答
回答
回答
回答
回答
回答


官方手机版

微信公众号

商务合作



0