目录一、ShaderLab1.Alpha值边缘检测2.卷积边缘检测二、ShaderGraph一、ShaderLab 1.Alpha值边缘检测 根据图片的Alpha值边缘判定,向内扩

根据图片的Alpha值边缘判定,向内扩一段距离做边缘,颜色设置未描边颜色;
片元着色阶段,向上下左右四个方向做检测,有一个点的透明度为0,判定为边缘;
Shader "2DOutline"
{
Properties
{
_MainTex("Texture", 2D) = "white" {}
_LineWidth("Width",Range(0,0.4)) = 1.0
_LineColor("LineColor",color) = (1,1,1,1)
_Intensity("Intensity",Range(1,10)) = 1.0
}
SubShader
{
Tags { "RenderType" = "Opaque" "Queue" = "Transparent"}
Blend SrcAlpha OneMinusSrcAlpha
Pass
{
CGPROGRAM
#pragma vertex vert
#pragma fragment frag
#include "UnityCG.cginc"
struct appdata
{
float4 vertex : POSITioN;
float2 uv : TEXCOORD0;
};
struct v2f
{
float2 uv : TEXCOORD0;
float4 vertex : SV_POSITION;
};
sampler2D _MainTex;
float4 _MainTex_ST;
fixed _LineWidth;
float4 _LineColor;
fixed _Intensity;
v2f vert(appdata v)
{
v2f o;
o.vertex = UnityObjectToClipPos(v.vertex);
o.uv = TRANSFORM_TEX(v.uv, _MainTex);
return o;
}
fixed4 frag(v2f i) : SV_Target
{
fixed4 col = tex2D(_MainTex, i.uv);
// 采样周围4个点
float2 up_uv = i.uv + float2(0, 1) * _LineWidth * 1 / 10 * _MainTex_ST.xy;
float2 down_uv = i.uv + float2(0,-1) * _LineWidth * 1 / 10 * _MainTex_ST.xy;
float2 left_uv = i.uv + float2(-1,0) * _LineWidth * 1 / 10 * _MainTex_ST.xy;
float2 right_uv = i.uv + float2(1,0) * _LineWidth * 1 / 10 * _MainTex_ST.xy;
// 如果有一个点透明度为0 说明是边缘
float w = tex2D(_MainTex,up_uv).a * tex2D(_MainTex,down_uv).a * tex2D(_MainTex,left_uv).a * tex2D(_MainTex,right_uv).a;
if (w == 0) {
col.rgb = lerp(_LineColor * _Intensity, col.rgb, w);
}
return col;
}
ENDCG
}
}
}
如果图片内容恰好铺满整张图,没有alpha值,方法不适用;下图底部边缘消失了;
在屏幕后处理阶段,使用卷积做边缘检测;
卷积:根据像素周围八个方向的像素的计算出新的像素值;
边缘检测卷积算子,都包含水平和竖直两个方向的卷积核;
梯度公式:G = sqrt(Gx*Gx + Gy*Gy);
考虑性能问题,使用:G = |Gx|+|Gy|;

顶点着色器计算卷积纹理采样坐标,减少计算量(片元数量更多);
片元着色阶段Sobel卷积计算,插值获得片元像素颜色;
Sobel计算结果和梯度Gradient比较,大于梯度和EdgeColor做插值;
屏幕后效调用OnRenderImage接口;
Shader "EdgeDetection"
{
Properties{
_MainTex("Base (RGB)", 2D) = "white" {}
_EdgeColor("Edge Color", Color) = (0, 0, 0, 1)
//卷积梯度
_Gradient("Gradient",float) =0.0
}
SubShader{
Pass
{
ZTest Always Cull Off ZWrite Off
CGPROGRAM
#include "UnityCG.cginc"
#pragma vertex vert
#pragma fragment frag
sampler2D _MainTex;
uniform half4 _MainTex_TexelSize;
//fixed _EdgeOnly;
fixed4 _EdgeColor;
//fixed4 _BackgroundColor;
fixed _Gradient;
struct v2f {
float4 pos : SV_POSITION;
half2 uv[9] : TEXCOORD0;
};
v2f vert(appdata_img v) {
v2f o;
o.pos = UnityObjectToClipPos(v.vertex);
half2 uv = v.texcoord;
o.uv[0] = uv + _MainTex_TexelSize.xy * half2(-1, -1);
o.uv[1] = uv + _MainTex_TexelSize.xy * half2(0, -1);
o.uv[2] = uv + _MainTex_TexelSize.xy * half2(1, -1);
o.uv[3] = uv + _MainTex_TexelSize.xy * half2(-1, 0);
o.uv[4] = uv + _MainTex_TexelSize.xy * half2(0, 0);
o.uv[5] = uv + _MainTex_TexelSize.xy * half2(1, 0);
o.uv[6] = uv + _MainTex_TexelSize.xy * half2(-1, 1);
o.uv[7] = uv + _MainTex_TexelSize.xy * half2(0, 1);
o.uv[8] = uv + _MainTex_TexelSize.xy * half2(1, 1);
return o;
}
fixed luminance(fixed4 color) {
return 0.2125 * color.r + 0.7154 * color.g + 0.0721 * color.b;
}
half Sobel(v2f i) {
const half Gx[9] = { -1, 0, 1,
-2, 0, 2,
-1, 0, 1};
const half Gy[9] = { -1, -2, -1,
0, 0, 0,
1, 2, 1};
half texColor;
half edgeX = 0;
half edgeY = 0;
for (int it = 0; it < 9; it++) {
texColor = luminance(tex2D(_MainTex, i.uv[it]));
edgeX += texColor * Gx[it];
edgeY += texColor * Gy[it];
}
half edge = 1 - abs(edgeX) - abs(edgeY);
return edge;
}
fixed4 frag(v2f i) : SV_Target {
half edge = Sobel(i);
fixed4 col = tex2D(_MainTex, i.uv[4]);
if(edge> _Gradient)
col = lerp(_EdgeColor, tex2D(_MainTex, i.uv[4]), edge);
return col;
}
ENDCG
}
}
FallBack Off
}

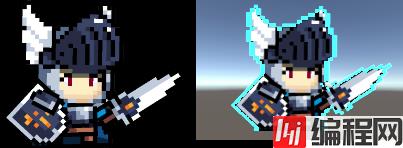
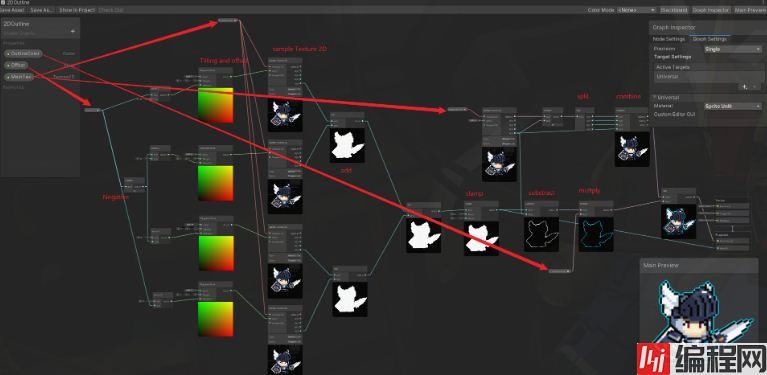
抓取图片缓冲,上下左右四个方位平移,乘以描边颜色;
四张图合并,减去原图范围的像素,只剩边缘;
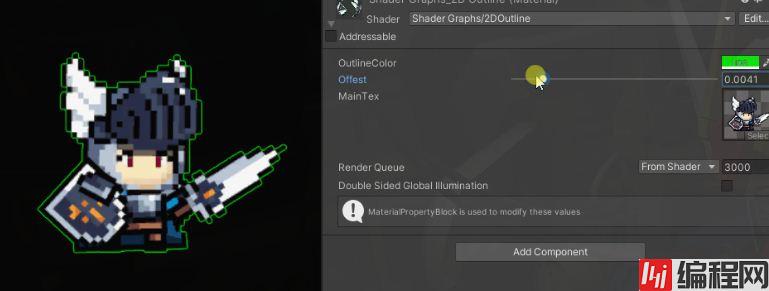
最后将原图和边缘合并(可插值使边缘柔和);
升级项目到URP,修改projectsetting-graphic-pielinesettings;
导入ShaderGraph包,开始拖拖拽拽,真的香,效果好,速度快,思路清晰;
到此这篇关于基于Unity实现2D边缘检测的文章就介绍到这了,更多相关Unity边缘检测内容请搜索编程网以前的文章或继续浏览下面的相关文章希望大家以后多多支持编程网!
--结束END--
本文标题: 基于Unity实现2D边缘检测
本文链接: https://www.lsjlt.com/news/145612.html(转载时请注明来源链接)
有问题或投稿请发送至: 邮箱/279061341@qq.com QQ/279061341
下载Word文档到电脑,方便收藏和打印~
2024-03-01
2024-03-01
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
回答
回答
回答
回答
回答
回答
回答
回答
回答
回答


官方手机版

微信公众号

商务合作


0