这篇文章主要讲解了“PyTorch之8层神经网络怎么实现Cifar-10图像分类验证”,文中的讲解内容简单清晰,易于学习与理解,下面请大家跟着小编的思路慢慢深入,一起来研究和学习“Pytorch之8层神经网络怎么实现Cifar-10图像分类
这篇文章主要讲解了“PyTorch之8层神经网络怎么实现Cifar-10图像分类验证”,文中的讲解内容简单清晰,易于学习与理解,下面请大家跟着小编的思路慢慢深入,一起来研究和学习“Pytorch之8层神经网络怎么实现Cifar-10图像分类验证”吧!
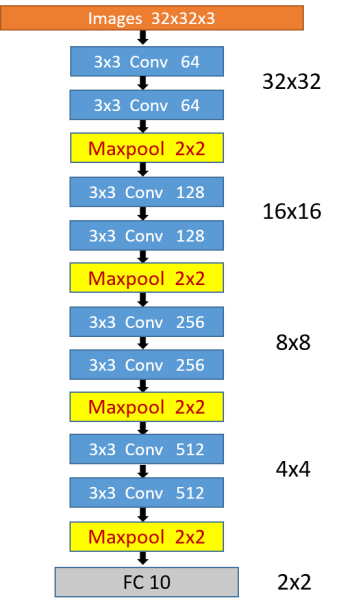
网络结构采用最简洁的类VGG结构,即全部由3*3卷积和最大池化组成,后面接一个全连接层用于分类,网络大小仅18M左右。
class Block(nn.Module): def __init__(self, inchannel, outchannel, res=True): super(Block, self).__init__() self.res = res # 是否带残差连接 self.left = nn.Sequential( nn.Conv2d(inchannel, outchannel, kernel_size=3, padding=1, bias=False), nn.BatchNORM2d(outchannel), nn.ReLU(inplace=True), nn.Conv2d(outchannel, outchannel, kernel_size=3, padding=1, bias=False), nn.BatchNorm2d(outchannel), ) if stride != 1 or inchannel != outchannel: self.shortcut = nn.Sequential( nn.Conv2d(inchannel, outchannel, kernel_size=1, bias=False), nn.BatchNorm2d(outchannel), ) else: self.shortcut = nn.Sequential() self.relu = nn.Sequential( nn.ReLU(inplace=True), ) def forward(self, x): out = self.left(x) if self.res: out += self.shortcut(x) out = self.relu(out) return outclass myModel(nn.Module): def __init__(self, cfg=[64, 'M', 128, 'M', 256, 'M', 512, 'M'], res=True): super(myModel, self).__init__() self.res = res # 是否带残差连接 self.cfg = cfg # 配置列表 self.inchannel = 3 # 初始输入通道数 self.futures = self.make_layer() # 构建卷积层之后的全连接层以及分类器: self.classifier = nn.Sequential(nn.Dropout(0.4), # 两层fc效果还差一些 nn.Linear(4 * 512, 10), ) # fc,最终Cifar10输出是10类 def make_layer(self): layers = [] for v in self.cfg: if v == 'M': layers.append(nn.MaxPool2d(kernel_size=2, stride=2)) else: layers.append(Block(self.inchannel, v, self.res)) self.inchannel = v # 输入通道数改为上一层的输出通道数 return nn.Sequential(*layers) def forward(self, x): out = self.futures(x) # view(out.size(0), -1): change tensor size from (N ,H , W) to (N, H*W) out = out.view(out.size(0), -1) out = self.classifier(out) return out该网络可以很方便的改造成带残差的,只要在初始化网络时,将参数res设为True即可,并可改变cfg配置列表来方便的修改网络层数。
所选数据集为Cifar-10,该数据集共有60000张带标签的彩色图像,这些图像尺寸32*32,分为10个类,每类6000张图。这里面有50000张用于训练,每个类5000张,另外10000用于测试,每个类1000张。
训练策略如下:
momentum=0.9 的 optim.SGD,adam在很多情况下能加速收敛,但因为是自适应学习率,在训练后期存在不能收敛到全局极值点的问题,所以采用能手动调节学习率的SGD,现在很多比赛和论文中也是采用该策略。设置weight_decay=5e-3,即设置较大的L2正则来降低过拟合。
# 定义损失函数和优化器loss_func = nn.CrossEntropyLoss()optimizer = optim.SGD(model.parameters(), lr=LR, momentum=0.9, weight_decay=5e-3)optim.lr_scheduler.MultiStepLR,参数设为:milestones=[int(num_epochs * 0.56), int(num_epochs * 0.78)], gamma=0.1,即在0.56倍epochs和0.78时分别下降为前一阶段学习率的0.1倍。
# 学习率调整策略 MultiStep:scheduler = optim.lr_scheduler.MultiStepLR(optimizer=optimizer, milestones=[int(num_epochs * 0.56), int(num_epochs * 0.78)], gamma=0.1, last_epoch=-1)在每个epoch训练完的时候一定要记得step一下,不然不会更新学习率,可以通过get_last_lr()来查看最新的学习率
# 更新学习率并查看当前学习率scheduler.step()print('\t last_lr:', scheduler.get_last_lr())实验表明,针对cifar10数据集,随机水平翻转、随机遮挡、随机中心裁剪能有效提高验证集准确率,而旋转、颜色抖动等则无效。
norm_mean = [0.485, 0.456, 0.406] # 均值 norm_std = [0.229, 0.224, 0.225] # 方差 transforms.Normalize(norm_mean, norm_std), #将[0,1]归一化到[-1,1] transforms.RandomHorizontalFlip(), # 随机水平镜像 transforms.RandomErasing(scale=(0.04, 0.2), ratio=(0.5, 2)), # 随机遮挡 transforms.RandomCrop(32, padding=4) # 随机中心裁剪batch_size = 512 # 约占用显存4Gnum_epochs = 200 # 训练轮数LR = 0.01 # 初始学习率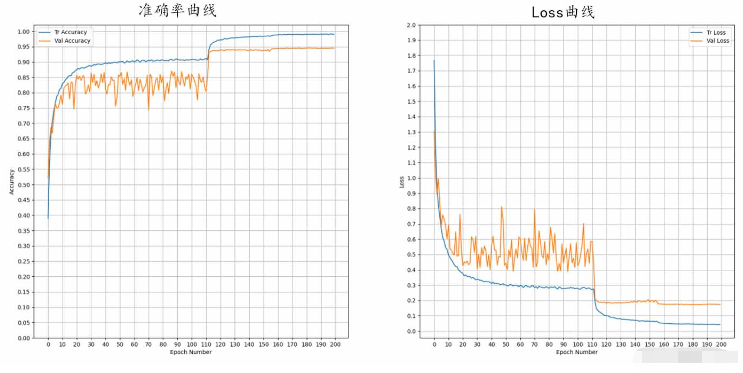
另外,将网络改成14层的带残差结构后,准确率上升到了95.56%,但是网络大小也从18M到了43M。
以下是14层残差网络的全部代码,8层的只需修改cfg和初始化时的res参数:
cfg=[64, ‘M’, 128, 128, ‘M’, 256, 256, ‘M’, 512, 512,‘M’] 修改为 [64, ‘M’, 128, ‘M’, 256, ‘M’, 512, ‘M’]
# *_* coding : UTF-8 *_*# 开发人员: csu·pan-_-||# 开发时间: 2020/12/29 15:17# 文件名称: battey_class.py# 开发工具: PyCharm# 功能描述: 自建CNN对cifar10进行分类import torchfrom torchvision import datasets, transformsimport torch.nn as nnimport torch.optim as optimfrom torch.utils.data import DataLoaderimport onnximport timeimport numpy as npimport matplotlib.pyplot as pltclass Block(nn.Module): def __init__(self, inchannel, outchannel, res=True, stride=1): super(Block, self).__init__() self.res = res # 是否带残差连接 self.left = nn.Sequential( nn.Conv2d(inchannel, outchannel, kernel_size=3, padding=1, stride=stride, bias=False), nn.BatchNorm2d(outchannel), nn.ReLU(inplace=True), nn.Conv2d(outchannel, outchannel, kernel_size=3, padding=1, stride=1, bias=False), nn.BatchNorm2d(outchannel), ) if stride != 1 or inchannel != outchannel: self.shortcut = nn.Sequential( nn.Conv2d(inchannel, outchannel, kernel_size=1, bias=False), nn.BatchNorm2d(outchannel), ) else: self.shortcut = nn.Sequential() self.relu = nn.Sequential( nn.ReLU(inplace=True), ) def forward(self, x): out = self.left(x) if self.res: out += self.shortcut(x) out = self.relu(out) return outclass myModel(nn.Module): def __init__(self, cfg=[64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512,'M'], res=True): super(myModel, self).__init__() self.res = res # 是否带残差连接 self.cfg = cfg # 配置列表 self.inchannel = 3 # 初始输入通道数 self.futures = self.make_layer() # 构建卷积层之后的全连接层以及分类器: self.classifier = nn.Sequential(nn.Dropout(0.4), # 两层fc效果还差一些 nn.Linear(4 * 512, 10), ) # fc,最终Cifar10输出是10类 def make_layer(self): layers = [] for v in self.cfg: if v == 'M': layers.append(nn.MaxPool2d(kernel_size=2, stride=2)) else: layers.append(Block(self.inchannel, v, self.res)) self.inchannel = v # 输入通道数改为上一层的输出通道数 return nn.Sequential(*layers) def forward(self, x): out = self.futures(x) # view(out.size(0), -1): change tensor size from (N ,H , W) to (N, H*W) out = out.view(out.size(0), -1) out = self.classifier(out) return outall_start = time.time()# 使用torchvision可以很方便地下载Cifar10数据集,而torchvision下载的数据集为[0,1]的PILImage格式# 我们需要将张量Tensor归一化到[-1,1]norm_mean = [0.485, 0.456, 0.406] # 均值norm_std = [0.229, 0.224, 0.225] # 方差transform_train = transforms.Compose([transforms.ToTensor(), # 将PILImage转换为张量 # 将[0,1]归一化到[-1,1] transforms.Normalize(norm_mean, norm_std), transforms.RandomHorizontalFlip(), # 随机水平镜像 transforms.RandomErasing(scale=(0.04, 0.2), ratio=(0.5, 2)), # 随机遮挡 transforms.RandomCrop(32, padding=4) # 随机中心裁剪 ])transform_test = transforms.Compose([transforms.ToTensor(), transforms.Normalize(norm_mean, norm_std)])# 超参数:batch_size = 256num_epochs = 200 # 训练轮数LR = 0.01 # 初始学习率# 选择数据集:trainset = datasets.CIFAR10(root='Datasets', train=True, download=True, transform=transform_train)testset = datasets.CIFAR10(root='Datasets', train=False, download=True, transform=transform_test)# 加载数据:train_data = DataLoader(dataset=trainset, batch_size=batch_size, shuffle=True)valid_data = DataLoader(dataset=testset, batch_size=batch_size, shuffle=False)cifar10_classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')train_data_size = len(trainset)valid_data_size = len(testset)print('train_size: {:4d} valid_size:{:4d}'.format(train_data_size, valid_data_size))device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")model = myModel(res=True)# 定义损失函数和优化器loss_func = nn.CrossEntropyLoss()optimizer = optim.SGD(model.parameters(), lr=LR, momentum=0.9, weight_decay=5e-3)# 学习率调整策略 MultiStep:scheduler = optim.lr_scheduler.MultiStepLR(optimizer=optimizer, milestones=[int(num_epochs * 0.56), int(num_epochs * 0.78)], gamma=0.1, last_epoch=-1)# 训练和验证:def train_and_valid(model, loss_function, optimizer, epochs=10): model.to(device) history = [] best_acc = 0.0 best_epoch = 0 for epoch in range(epochs): epoch_start = time.time() print("Epoch: {}/{}".format(epoch + 1, epochs)) model.train() train_loss = 0.0 train_acc = 0.0 valid_loss = 0.0 valid_acc = 0.0 for i, (inputs, labels) in enumerate(train_data): inputs = inputs.to(device) labels = labels.to(device) # 因为这里梯度是累加的,所以每次记得清零 optimizer.zero_grad() outputs = model(inputs) loss = loss_function(outputs, labels) loss.backward() optimizer.step() train_loss += loss.item() * inputs.size(0) ret, predictions = torch.max(outputs.data, 1) correct_counts = predictions.eq(labels.data.view_as(predictions)) acc = torch.mean(correct_counts.type(torch.FloatTensor)) train_acc += acc.item() * inputs.size(0) with torch.no_grad(): model.eval() for j, (inputs, labels) in enumerate(valid_data): inputs = inputs.to(device) labels = labels.to(device) outputs = model(inputs) loss = loss_function(outputs, labels) valid_loss += loss.item() * inputs.size(0) ret, predictions = torch.max(outputs.data, 1) correct_counts = predictions.eq(labels.data.view_as(predictions)) acc = torch.mean(correct_counts.type(torch.FloatTensor)) valid_acc += acc.item() * inputs.size(0) # 更新学习率并查看当前学习率 scheduler.step() print('\t last_lr:', scheduler.get_last_lr()) avg_train_loss = train_loss / train_data_size avg_train_acc = train_acc / train_data_size avg_valid_loss = valid_loss / valid_data_size avg_valid_acc = valid_acc / valid_data_size history.append([avg_train_loss, avg_valid_loss, avg_train_acc, avg_valid_acc]) if best_acc < avg_valid_acc: best_acc = avg_valid_acc best_epoch = epoch + 1 epoch_end = time.time() print( "\t Training: Loss: {:.4f}, Accuracy: {:.4f}%, " "\n\t Validation: Loss: {:.4f}, Accuracy: {:.4f}%, Time: {:.3f}s".format( avg_train_loss, avg_train_acc * 100, avg_valid_loss, avg_valid_acc * 100, epoch_end - epoch_start )) print("\t Best Accuracy for validation : {:.4f} at epoch {:03D}".format(best_acc, best_epoch)) torch.save(model, '%s/' % 'cifar10_my' + '%02d' % (epoch + 1) + '.pt') # 保存模型 # # 存储模型为onnx格式: # d_cuda = torch.rand(1, 3, 32, 32, dtype=torch.float).to(device='cuda') # onnx_path = '%s/' % 'cifar10_shuffle' + '%02d' % (epoch + 1) + '.onnx' # torch.onnx.export(model.to('cuda'), d_cuda, onnx_path) # shape_path = '%s/' % 'cifar10_shuffle' + '%02d' % (epoch + 1) + '_shape.onnx' # onnx.save(onnx.shape_inference.infer_shapes(onnx.load(onnx_path)), shape_path) # print('\t export shape success...') return model, historytrained_model, history = train_and_valid(model, loss_func, optimizer, num_epochs)history = np.array(history)# Loss曲线plt.figure(figsize=(10, 10))plt.plot(history[:, 0:2])plt.legend(['Tr Loss', 'Val Loss'])plt.xlabel('Epoch Number')plt.ylabel('Loss')# 设置坐标轴刻度plt.xticks(np.arange(0, num_epochs + 1, step=10))plt.yticks(np.arange(0, 2.05, 0.1))plt.grid() # 画出网格plt.savefig('cifar10_shuffle_' + '_loss_curve1.png')# 精度曲线plt.figure(figsize=(10, 10))plt.plot(history[:, 2:4])plt.legend(['Tr Accuracy', 'Val Accuracy'])plt.xlabel('Epoch Number')plt.ylabel('Accuracy')# 设置坐标轴刻度plt.xticks(np.arange(0, num_epochs + 1, step=10))plt.yticks(np.arange(0, 1.05, 0.05))plt.grid() # 画出网格plt.savefig('cifar10_shuffle_' + '_accuracy_curve1.png')all_end = time.time()all_time = round(all_end - all_start)print('all time: ', all_time, ' 秒')print("All Time: {:d} 分 {:d} 秒".format(all_time // 60, all_time % 60))感谢各位的阅读,以上就是“Pytorch之8层神经网络怎么实现Cifar-10图像分类验证”的内容了,经过本文的学习后,相信大家对Pytorch之8层神经网络怎么实现Cifar-10图像分类验证这一问题有了更深刻的体会,具体使用情况还需要大家实践验证。这里是编程网,小编将为大家推送更多相关知识点的文章,欢迎关注!
--结束END--
本文标题: Pytorch之8层神经网络怎么实现Cifar-10图像分类验证
本文链接: https://www.lsjlt.com/news/353402.html(转载时请注明来源链接)
有问题或投稿请发送至: 邮箱/279061341@qq.com QQ/279061341
下载Word文档到电脑,方便收藏和打印~
2024-05-10
2024-05-10
2024-05-10
2024-05-10
2024-05-10
2024-05-10
2024-05-10
2024-05-10
2024-05-10
2024-05-10
回答
回答
回答
回答
回答
回答
回答
回答
回答
回答


官方手机版

微信公众号

商务合作



0