Python 官方文档:入门教程 => 点击学习
目录原理Sobel检测算子Laplacian算子算子比较原理 边缘检测是图像处理和计算机视觉当中的基本问题,边缘检测的目的是标识数字图像中亮度变化明显的点,图像的边缘检测可以大幅度的
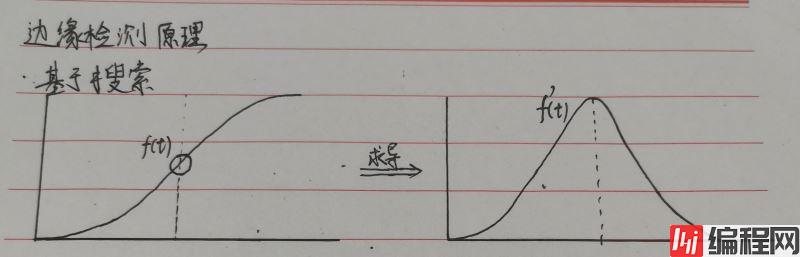
边缘检测是图像处理和计算机视觉当中的基本问题,边缘检测的目的是标识数字图像中亮度变化明显的点,图像的边缘检测可以大幅度的减少数据量,并且剔除了可以认为不相关的信息,保留了图像重要的结构属性,它们绝大多数可以分为两类:基于搜索和基于零穿越。
基于搜索:通过寻找图像一阶导数中max来检测边界,然后利用计算结果估计边缘的局部方向,通常采用梯度的方向,并在此方向找到局部梯度模的最大值,代表的算法是Sobel算子和Scharr算子。
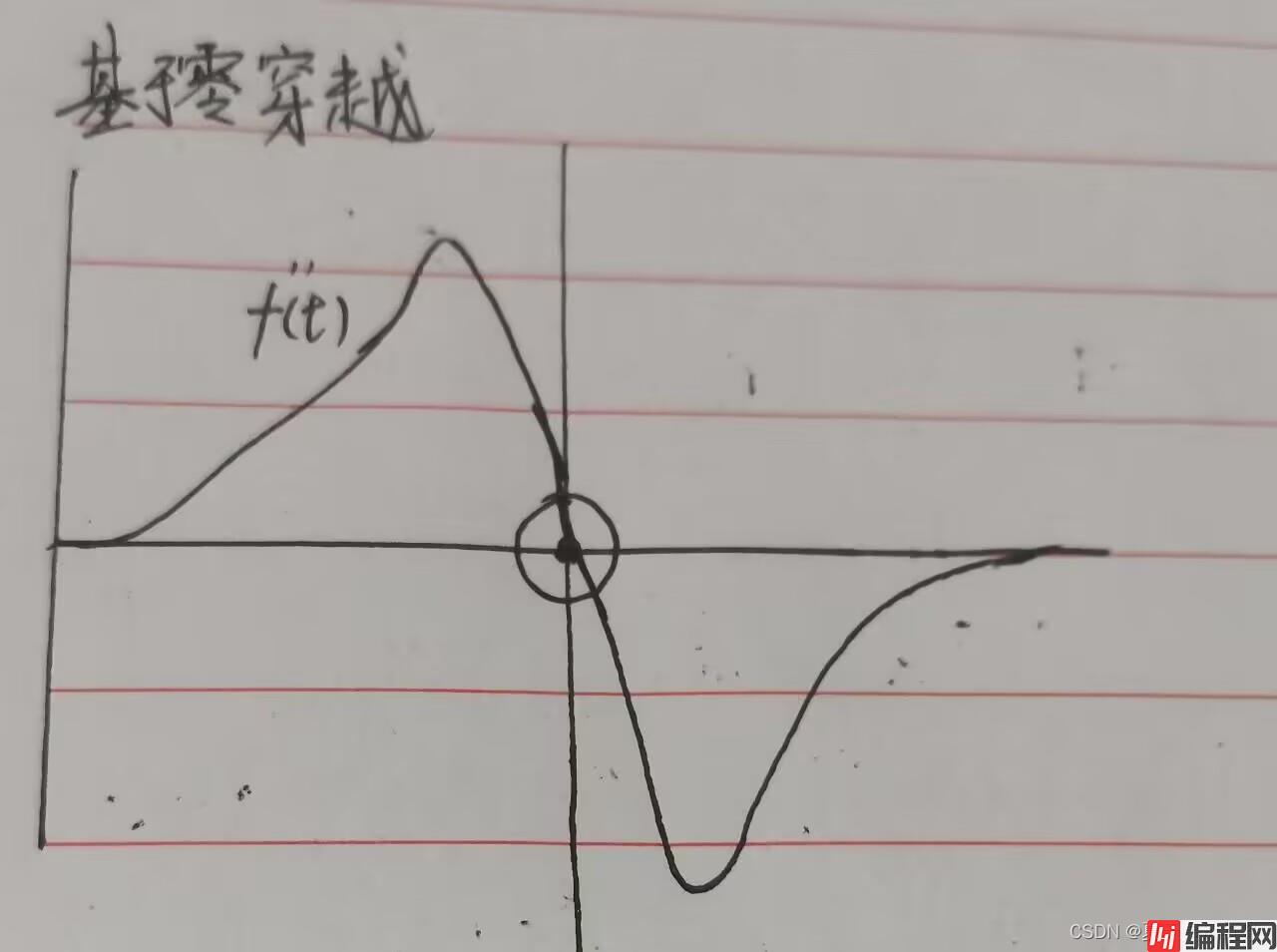
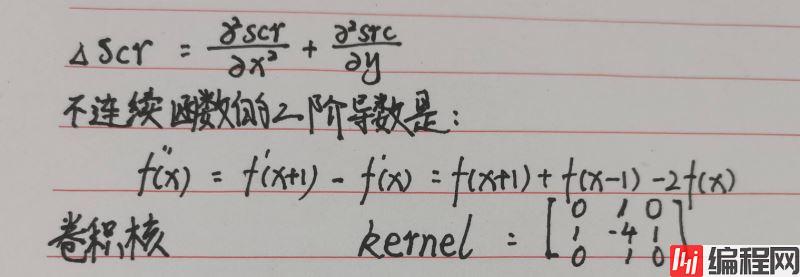
基于零穿越:通过寻找图像二阶导数零穿越来寻找边界,代表算法是Laplacian算子。
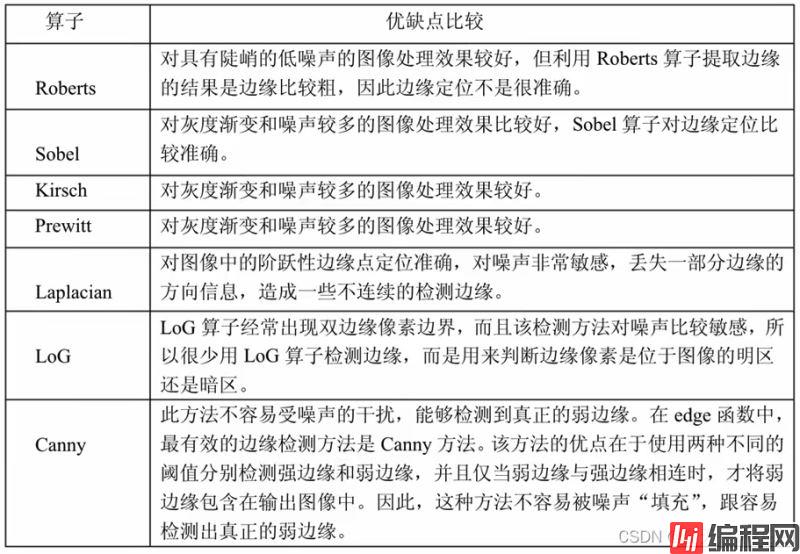
Sobel边缘检测算法比较简单,实际应用中效率要比Canny边缘检测算法效率要高,但边缘检测效果不如Canny准确,但很多常会它依旧是首选,它是高斯平滑与微分操作的结合体,所以其抗燥声能力很强,用途较多,尤其是对效率要求较高,而对细纹理不是很在意的情况下。
方法

那么我们看到上图最后一个式子,在某一个领域内,某一方向上,前一个像素与后一个像素的差,除以(x+1)-(x-1)=2,就得到当前的一个一阶导数,这就是Sobel算子的一个思想。
这里假设要处理的对象为I,在两个方向求导:
如下,模板为3;
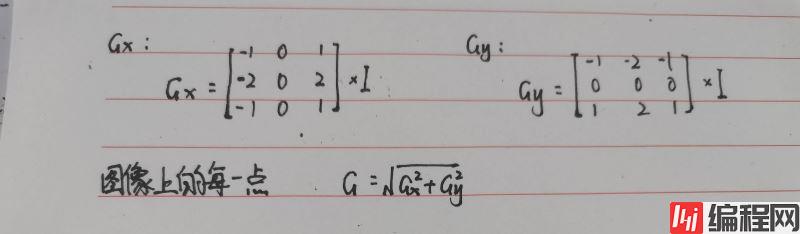
最后,统计极大值所在的位置,即为图像的边缘
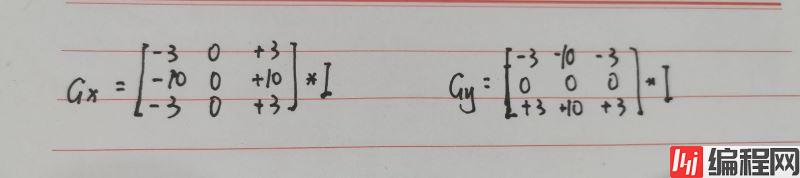
注:当内核大小为3时,以上Sobel内核可能会产生比较明显的误差,为解决这一个问题,我们使用Scharr函数,但该函数仅作用于大小为3的内核,该函数的运行速度与Sobel算子一样快,但结果更加精准,其计算方法为下图所示:
应用
sobel_x_or_y=Sobel(src, ddepth, dx, dy, dst=None, ksize=None, scale=None, delta=None, borderType=None)
"""
src:传入图像
ddepth:图像的深度
dx、dy=指求导的阶数,0表示这个方向上没有求导,取值为0、1
ksize=是Sobel算子的大小,即卷积核的大小,为奇数(1,3,5,7等),默认是3
scale:缩放导数的比例常数,默认没有
borderType:函数的边界模式,默认是cv2.BORDER_DEFAULT
"""
Sobel函数求导后会有负数,还有大于255的值,原图像为uint8,8位无符号数,所以Sobel建立的图像位数不够,会有截断。因此,要用16位有符号的数据类型,即cv2.CV_16S(放到深度中)。处理完图像后,再使用cv2.convertScaleAbs()函数将其再转为uint8格式,否则无法显示图像。
Sobel算子是两个方向计算的,最后要用cv2.addWeighted()函数将其组合起来
Scale_abs=cv2.convertScaleAbs(x)
result=cv2.addWeighted(scr1,alpha,scr2,beta) #混合x,y方向
import cv2
import numpy as np
from matplotlib import pyplot as plt
img=cv2.imread("Images/1-1.jpg",0)
#Sobel:x,y方向
x=cv2.Sobel(img,cv2.CV_16S,1,0)
y=cv2.Sobel(img,cv2.CV_16S,0,1)
#数据转化
Scale_absx=cv2.convertScaleAbs(x)
Scale_absy=cv2.convertScaleAbs(y)
#混合图像
result=cv2.addWeighted(Scale_absx,0.5,Scale_absy,0.5,0)
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('yuantu')
plt.xticks([]),plt.yticks([])
plt.subplot(122),plt.imshow(result,cmap=plt.cm.gray),plt.title('Sobel')
plt.xticks([]),plt.yticks([])
plt.show()而Scharr,就是将Sobel算子当中的变成ksize=-1。
x=cv2.Sobel(img,cv2.CV_16S,1,0,ksize=-1)
y=cv2.Sobel(img,cv2.CV_16S,0,1,ksize=-1)可以看到,Scharr检测的细节更加多一些。
laplacian是利用二阶导数来检测边缘。因为图像是“二维”,需要在两个方向上求导,如下所示
API:
laplacian=cv2.Laplacian(src, ddepth, dst=None, ksize=None, scale=None, delta=None, borderType=None)
"""
src:图像
Ddepth:图像的深度,-1表示采用的是原图像相同的深度,目标图像的深度必须要大于等于原图像的深度;
ksize:卷积核的大小,必须为奇数
"""
import cv2
import numpy as np
from matplotlib import pyplot as plt
img=cv2.imread("Images/1-1.jpg",0)
result=cv2.Laplacian(img,cv2.CV_16S)
Scale_abs=cv2.convertScaleAbs(result)
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('yuantu')
plt.xticks([]),plt.yticks([])
plt.subplot(122),plt.imshow(result,cmap=plt.cm.gray),plt.title('laplacian')
plt.xticks([]),plt.yticks([])
plt.show()
到此这篇关于python图像处理之边缘检测原理详解的文章就介绍到这了,更多相关Python边缘检测内容请搜索编程网以前的文章或继续浏览下面的相关文章希望大家以后多多支持编程网!
--结束END--
本文标题: Python图像处理之边缘检测原理详解
本文链接: https://www.lsjlt.com/news/174303.html(转载时请注明来源链接)
有问题或投稿请发送至: 邮箱/279061341@qq.com QQ/279061341
下载Word文档到电脑,方便收藏和打印~
2024-03-01
2024-03-01
2024-03-01
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
2024-02-29
回答
回答
回答
回答
回答
回答
回答
回答
回答
回答


官方手机版

微信公众号

商务合作


0